
LBMPC Method
Learning-based model predictive control (LBMPC) is a new technique that rigorously combines statistics and learning with control engineering, while providing levels of guarantees about safety, robustness, and convergence. It achieves this by decoupling the notion of safety and robustness from the notion of performance. An approximate model of a system with knowledge of its uncertainty provides safety, and statistical and learning methods refine the model and improve performance.
A useful analogy for describing what LBMPC does is the difference between driving a normal car and a sports car. When a regular driver uses a sports car, they use their mental model of a normal car to make sure they do not crash. As they spend more time in the sports car, they improve their mental model of the car and can drive it more precisely.
LBMPC safely improves the operational characteristics of different engineered systems, and it has been applied to energy-efficient building automation and high-performance semi-autonomous systems. An implementation in C++ source code is available from lbmpc.bitbucket.org.
Theory and Software
- Numerical Solver Software and Background
- X. Zhang, P. Bouffard, A. Aswani, and C. Tomlin (2013), Numerical solvers for LBMPC that are implemented in C++ source code.
- X. Zhang, P. Bouffard, A. Aswani, and C. Tomlin (2013), Practical comparison of optimization algorithms for learning-based MPC with linear models. arXiv preprint arXiv:1404.2843.
- Stability and Stochastic Epi-Convergence Theory
-
A. Aswani, H. Gonzalez, S. Sastry, and C. Tomlin (2013), Provably safe and robust learning-based model predictive control, Automatica, vol. 49, no. 5: 1216-1226.
Technical Appendix — Statistical results on filtering and epi-convergence for learning-based model predictive control
Helicopter Catching
LBMPC identifies physical phenomena like ground effect and uses this to refine the model of a quadrotor helicopter, which improves flight performance while providing robustness and safety. This enables the precise movements necessary for tasks such as catching a ball.
- Related Publications
- P. Bouffard, A. Aswani, and C. Tomlin (2012), Learning-based model predictive control on a quadrotor: Onboard implementation and experimental results, In Proccedings of IEEE International Conference on Robotics and Automation: 279-284.
- A. Aswani, P. Bouffard, and C. Tomlin (2012), Extensions of learning-based model predictive control for real-time application to a quadrotor helicopter, In Proceedings of the American Control Conference: 4661-4666.
Efficient Buildings
LBMPC uses statistical methods to estimate heating load due to occupants and equipment in a room using only temperature measurements. This allows it to compensate for these highly varying effects and leads to significant reductions in energy consumption for heating, ventilation, and air-conditioning (HVAC) systems on experimental testbeds.
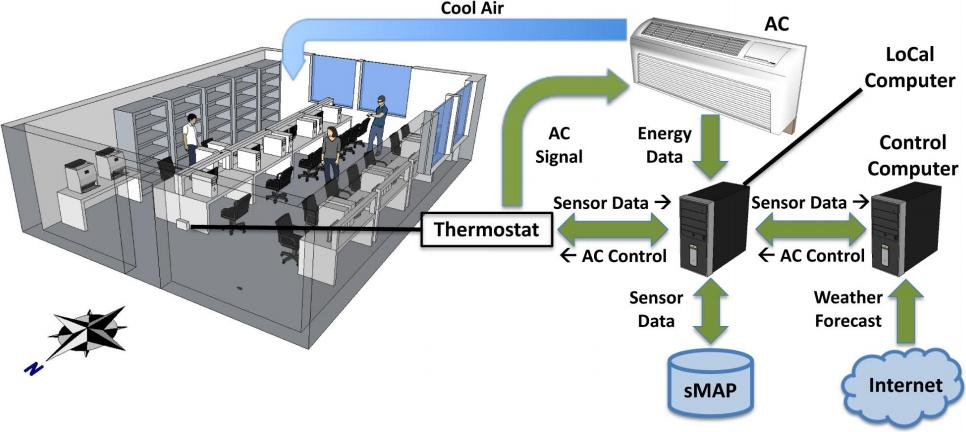 Berkeley Retrofitted and Inexpensive HVAC Testbed for Energy Efficiency (BRITE) |
- Related Publications
- A. Aswani and C. Tomlin (2012), Incentive Design for Efficient Building Quality of Service, In Allerton Conference on Communication, Control, and Computing.
-
A. Aswani, N. Master, J. Taneja, A. Krioukov, D. Culler, and C. Tomlin (2012), Quantitative methods for comparing different HVAC control schemes, In International Conference on Performance Evaluation Methodologies and Tools.
Supplementary Code - A. Aswani, N. Master, J. Taneja, A. Krioukov, D. Culler, and C. Tomlin (2012), Energy-efficient building HVAC control using hybrid system LBMPC, In Proceedings of IFAC Conference on Nonlinear Model Predictive Control.
- A. Aswani, N. Master, J. Taneja, V. Smith, A. Krioukov, D. Culler, and C. Tomlin (2012), Identifying models of HVAC systems using semi-parametric regression, In Proceedings of the American Control Conference: 3675-3680.
-
A. Aswani, N. Master, J. Taneja, D. Culler, and C. Tomlin (2012), Reducing transient and steady state electricity consumption in HVAC using learning-based model predictive control, Proceedings of the IEEE, vol. 100, no. 1: 240-253.
Open Access E-print